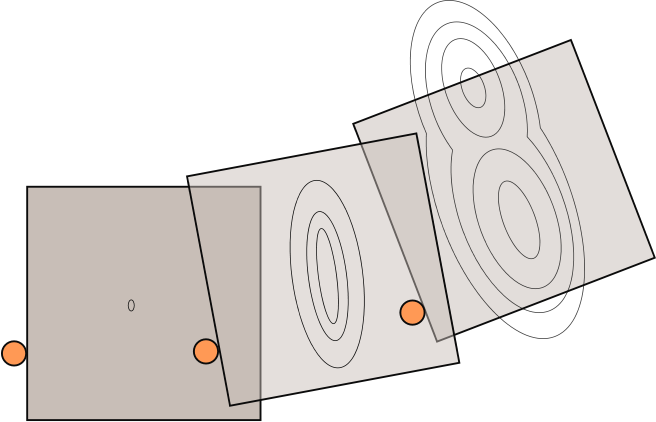
Figure 1: The motion of an object being pushed appears stochastic and possibly multi-modal due to imperfections in contact surfaces, non-uniform coefficient of friction, stick/slip transitions, and micro surface interactions. In this study, we propose to augment analytical models to more accurately predict such outcomes while reasoning about uncertainty.
Abstract
An efficient, generalizable physical simulator with universal uncertainty estimates has wide applications in robot state estimation, planning, and control. In this paper, we build such a simulator for two scenarios, planar pushing and ball bouncing, by augmenting an analytical rigid-body simulator with a neural network that learns to model uncertainty as residuals. Combining symbolic, deterministic simulators with learnable, stochastic neural nets provides us with expressiveness, efficiency, and generalizability simultaneously. Our model outperforms both purely analytical and purely learned simulators consistently on real, standard benchmarks. Compared with methods that model uncertainty using Gaussian processes, our model runs much faster, generalizes better to new object shapes, and is able to characterize the complex distribution of object trajectories.